



















































































































































Hirdetés
-

- Agrárhírek
-
Túl lassúak a gyümölcsszedő robotok, de a megoldás már úton van
Túl lassúak a gyümölcsszedő robotok, de a megoldás már úton van
Előző cikkünkben a „rázd és fogd fel” elnevezésű gyümölcsszedési módszerről írtunk, melyet szorgos kutatók igyekeznek a lehetőségekhez mérten legjobban automatizálni. Most nézzük meg, hogy a „fogd és helyezd el” módszer mennyivel jobb, mint az előbb említett.
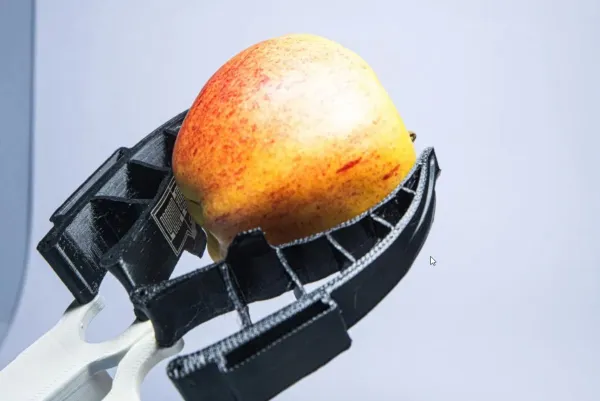
A módszer lényege, hogy a robot szedi le és helyezi a gyűjtőedénybe az érett gyümölcsöt úgy, hogy az ne sérüljön, friss termékként kerülhessen a vevőkhöz. A robotnak három feladatot kell ellátnia ezesetben: lokalizálnia kell az érett gyümölcsöt, meg kell fognia és le kell választania az ágról, majd el kell helyeznie a gyűjtőedénybe.
 Még pár év és robotok szedhetik a fákról a gyümölcsöt (Fotó: agroforum.hu)
Még pár év és robotok szedhetik a fákról a gyümölcsöt (Fotó: agroforum.hu)A módszer célja, hogy az élőmunkaigényt minimálisra csökkentsék a gyümölcstermesztő farmokon és robotokkal végeztessék el a nehéz munkát, lehetőség szerint gyorsan. A technológián már évtizedek óta dolgoznak, kevés sikerrel. A probléma rendszerint a robotok méretével, munkájuk sebességével és minőségével adódik. A gyümölcsök lokalizálása és a leszedett gyümölcsök gyűjtőedénybe helyezésével már nincsen probléma, a baj leginkább a leválasztáskor jelentkezik. Az esetek többségében átalakított ipari robotokat próbálnak gyümölcsszedésre bírni, ezek azonban nem képesek megbízhatóan teljesíteni a gyümölcs megfogását és leválasztását.
A washingtoni egyetem lelkes kutatói sikeresen kifejlesztettek ugyan egy almaszedő robotot, amely 6 másodperc alatt választja le az almát az ágról, ez azonban még mindig nem hozza a kívánt teljesítményszintet. A kutatók közben arra is rájöttek, hogy különböző leválasztási módszerek alkalmazásakor a megfogási erőszükséglet akár 100 százalékban is változhat, a leválasztásból származó gyümölcssérülés pedig 0-60 százalék között módosul.
Az agroforum.hu szerint l-átható, hogy a „fogd és helyezd el” módszer még nem alkalmas arra, hogy megbízhatóan tudjon frisss, piaci árut termelni, alternatív lehetőségeken azonban tovább dolgoznak a kutatók. Egyes vizsgálatok szrint célszerűbb lenne teljes robotizálás helyet olyan rendszert létrehozni, ahol ember és robot együttműködik a szedési folyamat során. Szintén a washingtoni egyetem tudósai egy gépi látási rendszeren dolgoznak, amely a gyümölcsök nagy részét képes megtalálni és helyzetét meghatározni. A kezelőnek csupán a maradék 1-2%-ban kell segíteni, amit a lombok eltakarnak a gép látása elől.
A világon egyébként több cég is próbálkozik gyümölcsszedő robotok kifejlesztésével. Egy kaliforniai cég például egy vákuumalapú szedőt alkalmaz, ami megakadályozza a gyümölcs sérülését szedés közben. Ez az eszköz például már képes a másodpercenkénti egy gyümölcs begyűjtésére.
Látható, hogy a szándék megvan, a tudás megvan, már csak a tökéletes eszközt kell létrehozni. Nem túlzás, ha azt mondjuk, 5-6 éven belül elkészülhet az a robot, amely képes lesz megfelelő mennyiségű és minőségű gyümölcs betakarítására.
Témák a cikkben
Megosztás
Kapcsolódó cikkek









Hirdetés
További híreink

Rendkívül kártékony rovar, az őszi sereghernyó lehetséges megjelenéséről jött figyelmeztetés
2024.12.03.Az őszi sereghernyó (Spodoptera frugiperda) az amerikai kontinens melegigényes őshonos faja, amely kiemelten veszélyes zárlati károsítóként szerepel az Európai és Mediterrán Növényvédelmi Szervezet (EPPO) A1-es karanténlistáján.
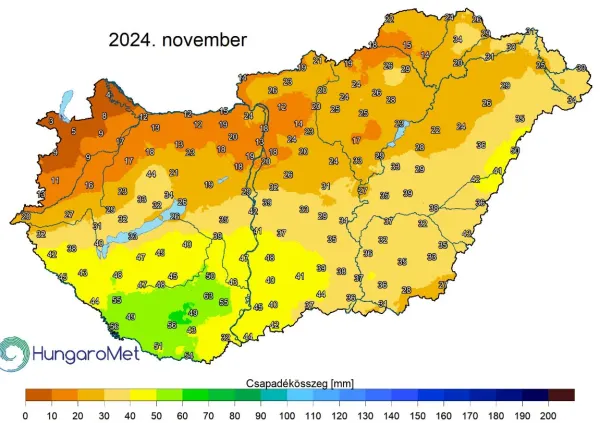
13 éve nem volt ilyen hideg Magyarországon
2024.12.03.Az idei november középhőmérséklete a legalacsonyabb volt 2011 óta. Emellett ez volt az első hónap 2023 májusa óta, amelynek középhőmérséklete országos átlagban az éghajlati normál alatt maradt.

Az aszály hatásai ellenére is lesz elég magyar karácsonyfa az idén
2024.12.03.Az aszály ugyan megviselte a fiatal ültetvényeket, mégsem kell hiányra számítani fenyőfából a karácsonyi időszakban.

Több változás lép életbe az adótörvényekben
2024.12.03.Az Országgyűlés elfogadta és kihirdette a 2024. évi LV. törvényt, amely számos adótörvény módosítását tartalmazza.

Tudja, mióta nem érkezett uniós forrás Magyarországra?
2024.12.03.Június 26-a óta Magyarország nem kapott újabb európai uniós támogatást, bár a 2021–2027-es pénzügyi ciklusban hazánknak járó 21,8 milliárd eurós keret 56 százaléka jelenleg hozzáférhető.

Karácsony közeledtével nem haszontalan tudni, melyek lettek az Év Szaloncukra 2024 díj legjobbjai
2024.12.03.Az idei fődíjat a maklári Stühmer Körtezselés-muskotályos szaloncukor érdemelte ki.
Legújabb hirdetések


 45.000Ft")





Hirdetés
Hirdetés

Védjük a gyökereket az Agrováció termékével
2024.12.03.A gyökérzónába kijuttatott AMG Pro-tech a csapadék/talajnedvesség hatására szétáramlik a gyökérzónában és védelmet alakít ki a kelő mag számára.

AKG 2025: kiknek érdemes belevágni és hogyan segíthetnek a szakértők?
2024.11.29.Az agráriumot izgalomban tartó kérdés most az új agrár-környezetgazdálkodási támogatás lehetősége. Minden termelőnek döntést kell hoznia lehetőségei és adottságai függvényében, hogy pályázik-e vagy sem. Ezt a kérdéskört jártuk körbe a Lajtamag Kft. termékfejlesztőjével, Somody Gergővel; Dr. Nagy Idával a Lajtamag Kft. szaktanácsadójával és Nagy Lászlóval, az Agro Profi Kft. vezető szaktanácsadójával.
Hirdetés
Hirdessen a Magro.hu oldalon!
Válasszon prémium megjelenési megoldásaink közül!
Médiaajánlat
Eladó John Deere 8345R e23 ILS 2020-as évjáratú traktor
69 900 000 HUF
+ áfa
Eladó használt MetalFach N267 szervestrágyaszóró
4 990 000 HUF
+ áfaMagro.hu Piactér
Több mint 1.100 hirdetés 104 kategóriában!
Megnézem a hirdetéseketIratkozzon fel hírlevelünkre!
Hirdetés
Hirdetés
Hirdetés
